摘 要:针对养护作业工作区路段车辆车道保持及其安全性问题, 首先进行了单幅双通路段实车试验和现场交通观测, 采集了驾驶员眼动数据和车辆行驶轨迹参数。然后分析了驾驶员注视角度、注视时间对车道保持的影响特征, 并建立了车道保持模型。最后提出了工作区路段安全性分析指标和标准, 并证明了所建立模型和标准的可行性及可靠性沥青网sinoasphalt.com。
关键词:工作区;驾驶员;车道保持;安全性;
养护作业区作为高速公路维护管理的重要组成部分, 高速公路养护作业区的行车风险受到越来越多的关注。很多学者已经针对养护作业区的安全性问题做了一定的研究。Hargroves、Stammer、Pigman和A-gent基于交通事故统计数据, 分析了高速公路作业区的交通事故特征;Bryden统计了高速公路养护作业区的事故数, 并对事故作出分析, 得到了高速公路养护作业区的事故数占高速公路事故总数的2%~3%;祁文洁基于车辆运行数据, 从不同方面对养护作业区特有的交通流特性进行了分析;Partrick S.Byrd和Geza Pesti等针对高速公路作业区上游合流路段的交通冲突进行了研究;Li Yingfeng和Baiyong研究养护作业区车辆运行的安全性, 并建立了用于评价养护作业区行车风险的模型;朱继彬通过研究养护作业区车辆合流和分流的安全性, 建立了相应的评价模型;周小焕提出采用宏观交通流状态与微观交通流行车安全性分析相结合的评价方法, 估计微观交通流的行车安全状态;李耘对施工作业不同区段在不同交通流状态下的车辆运行风险进行了研究。
大多数学者运用养护作业区的交通事故数据和车辆运行数据, 通过统计分析分别得到事故特征和交通流特性。除此之外, 基于交通冲突技术、驾驶员承受加速度状态、车速连续性 (第85%位车速差) 、交通事故率等指标 (方法) 评价了养护作业区行车风险。该文将以驾驶员的车道保持能力为指标研究车辆通过养护作业工作区的安全性。
养护作业区的车道保持能力, 即驾驶员根据养护作业路段交通管理措施、实时交通状况以及路面状况, 通过控制车辆的速度和行驶轨迹, 保证车辆在养护作业区按现场设置的特定路线安全行驶的能力。
该文通过对高速公路单幅双通养护作业区施工现场布置进行观测和调研, 分析车道保持能力的影响因素, 通过实车试验和交通运行观测采集工作区及其影响范围内驾驶员的注视角度、注视时间数据以及车辆行驶轨迹数据, 建立车道保持模型, 并将模型运用于养护作业工作区安全评价中, 通过车辆预测行驶轨迹偏移率与理论行驶轨迹偏移率的比较, 判断养护作业工作区车辆行驶的风险。
1 工作区车道保持能力影响因素分析
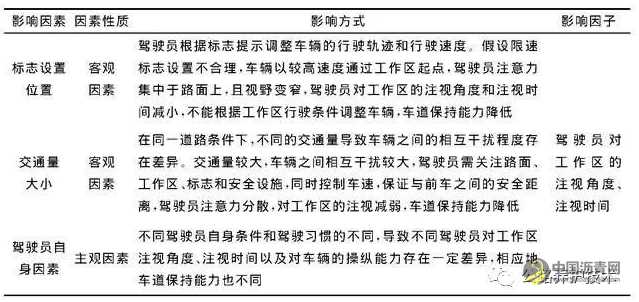
根据文献[12,13], 并结合试验数据分析, 初步确定驾驶员车道保持能力与养护作业工作区路段标志设置位置、交通量大小以及驾驶员自身因素等有关 (表1) 。由表1可见:车道保持能力主要与驾驶员对工作区的注视角度和注视时间有关。
2 工作区车道保持模型建立
通过车道保持模型因子分析, 确定模型建立对应的养护作业区段, 运用车辆行驶轨迹以及驾驶员对工作区的注视角度和注视时间试验数据建立回归模型。
2.1 车道保持模型因子分析
分析车辆通过单幅双通养护作业区的行驶状态以及驾驶员的注视特性, 确定养护作业区中的特殊路段, 作为模型建立的对应区段。
表1 车道保持能力影响因素分析
2.1.1 车辆行驶过程分析
车辆在上游过渡区完成合流后, 进入并适应缓冲区的行驶环境, 为继续向工作区行驶做准备。车辆在进入工作区后的短时间内, 驾驶员微调车辆位置, 判断并选择合适的行驶路线, 以保证车辆安全行驶。图1为单幅双通养护作业区布置图, 车辆行驶轨迹和车速标准差变化特征如图2、3所示。
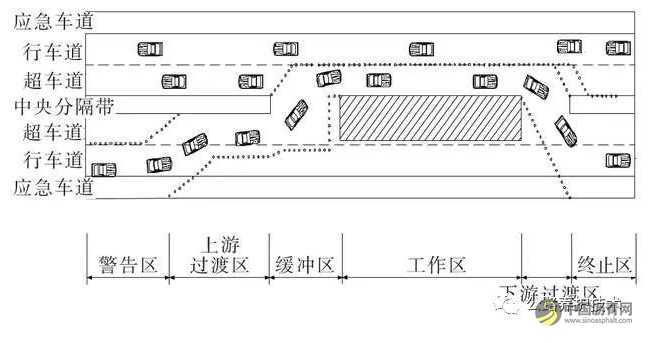
图1 养护作业区布置图
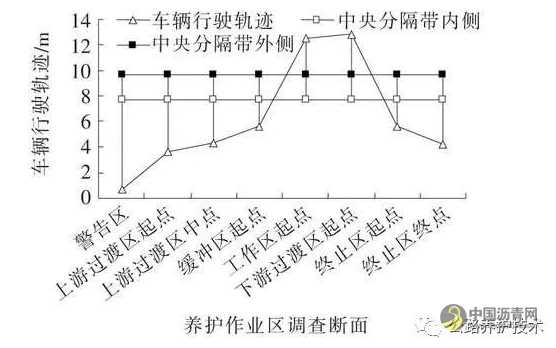
图2 养护作业区车辆行驶轨迹变化图
备注:行驶轨迹用车辆通过各个断面的位置距车行道边缘线的距离表示。
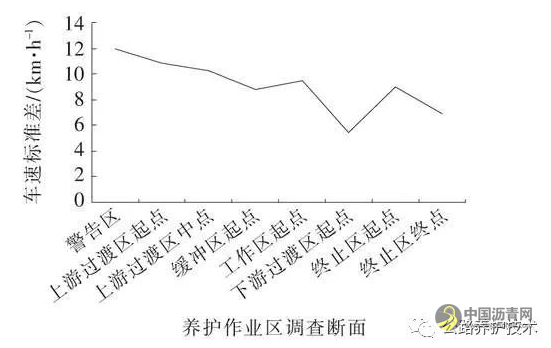
图3 养护作业区车速标准差变化图
图1~3反映了车辆通过养护作业路段的行驶轨迹和车速标准差变化情况。由图2可以看出:车辆行驶轨迹在缓冲区和下游过渡区变化最大, 在工作区变化最小。由图3可以看出:警告区、上游过渡区和缓冲区的车速离散程度较大。综合图2、3可知, 车辆在工作区起点 (车辆行驶轨迹突变点) 前的缓冲区运行较危险。
2.1.2 驾驶员通过工作区时的注视特性分析
车辆在养护作业区行驶, 驾驶员更关注相对复杂的道路环境。如图4、5所示, 分别为车辆通过工作区起点前后, 驾驶员水平注视角度和对工作区注视时间分布图, 结合养护作业区现场布置图 (图1) , 驾驶员水平注视角度的范围为 (-55°, 55°) , 其中, 驾驶员对工作区一侧道路环境的水平注视角度范围为 (0, 55°) , 由图4、6明显看出在工作区起点前40m至工作区起点后10m内, 对应于车辆通过该养护作业工作区起点前5s至后1s, 驾驶员水平注视角度和对工作区注视时间变化存在一定差异。
因此, 选取工作区起点前5s至后1s驾驶员对工作区的注视角度、注视时间和车辆行驶轨迹数据进行车道保持分析。
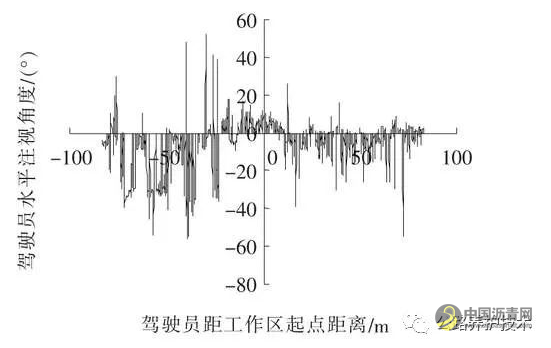
图4 驾驶员注视角度分布图
注:以工作区起点为原点, 工作区所在的方向为正方向。
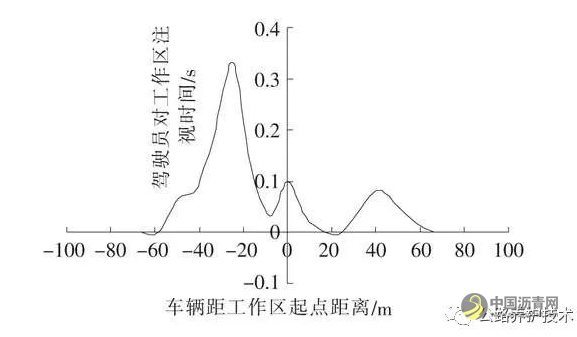
图5 驾驶员对工作区注视时间分布图
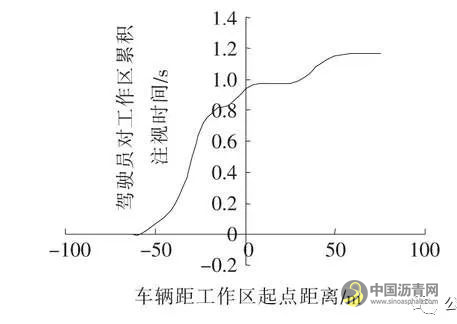
图6 驾驶员对工作区累积注视时间变化趋势图
2.2 回归模型建立
单幅双通养护作业区布置方案如图1所示, 封闭半幅车道, 另外半幅车道实行双向通行, 并设置交通安全设施。该文建立了两种道路条件下的工作区车道保持模型, 路段基本参数如表2所示。
表2 单幅双通路段基本参数

通过实地调研和现场试验, 利用Smart Eye Pro5.7型非侵入式眼动仪采集工作区起点断面前后6s (前方5s, 后方1s) 驾驶员对工作区的注视角度和注视时间, 利用激光测距仪采集车辆行驶轨迹。
2.2.1 自变量的选取
根据车辆通过养护作业工作区起点运行轨迹和驾驶员注视特点分析, 驾驶员对工作区的注视角度和注视时间随着车辆运行呈现一系列变化, 相应地车辆行驶轨迹也发生变化。选取驾驶员对工作区的水平注视角度和注视时间为自变量, 车辆行驶轨迹为因变量。
2.2.2 自变量相关性检验
在驾驶员车道保持模型建立中, 对水平注视角度和注视时间进行相关性检验, 结果如表3所示。
表3 自变量相关性检验结果
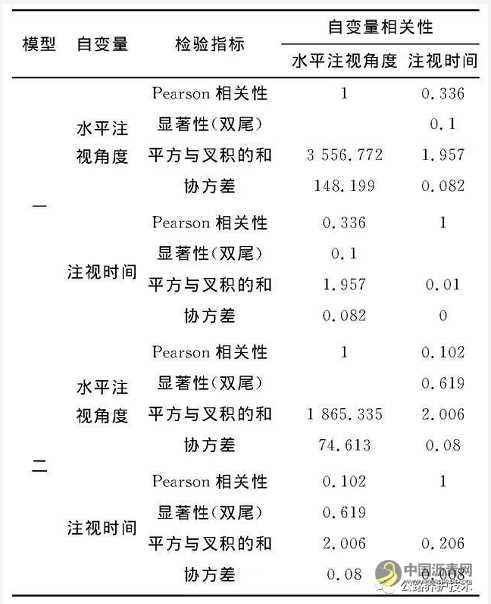
表3表明:两个模型中, 驾驶员对工作区的水平注视角度和注视时间的相关系数分别为0.336、0.102, 显著性水平分别为0.1、0.619, 均大于0.01, 则驾驶员对工作区的水平注视角度和注视时间的相关关系为不相关。
运用养护作业工作区起点前后6s的试验数据, 建立驾驶员车道保持模型。应用麦夸特法 (Levenberg-Marquardt) +通用全局优化法对模型参数进行估算, 得到的结果如表4所示。
模型一、二分别用式 (1) 、 (2) 表示, 模型回归形式均属于非线性回归。
表4 模型参数估计结果
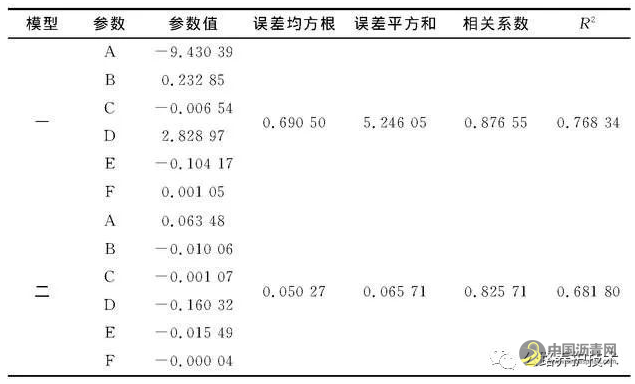
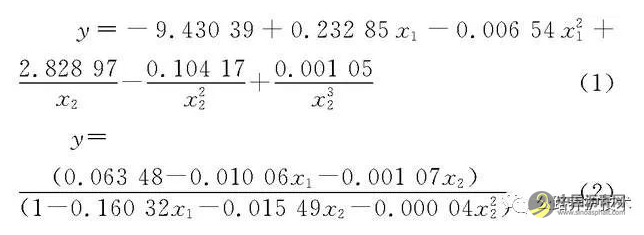
式中:y为行驶轨迹 (m) ;x1为水平注视角度 (°) ;x2为注视时间 (s) 。
表4表明: (1) 两模型拟合较好, 且车辆行驶轨迹与驾驶员对工作区水平注视角度和注视时间呈复杂函数关系; (2) 模型一的误差均方根和误差平方和明显大于模型二, 表明模型一对应的工作区路段车辆行驶轨迹离散程度较大, 则车道宽度越大, 车辆行驶轨迹越分散。所以, 单幅双通养护作业区的布置, 应适当减小车辆行驶通道的宽度。
根据文献[14], 车辆行驶轨迹可以反映养护作业工作区起点前后车辆行驶的安全性。在工作区安全性分析中, 用试验数据与模型进行拟合, 得到车辆的预测行驶轨迹, 并通过计算预测行驶轨迹偏移率, 判断车辆行驶的安全性。
在养护作业工作区起点, 车辆行驶路线的选择主要取决于交通安全隔离设施的具体布置。假设养护作业工作区起点前后路段车辆的行驶横向范围为一个车道宽度D, 养护作业区行驶车辆的宽度为L。
车辆行驶轨迹偏移率用式 (3) 表示:
式中:Q为车辆行驶轨迹偏移率 (车辆行驶轨迹线位于行车道中线左侧, Q取负值;车辆行驶轨迹线位于行车道中线右侧, Q取正值) ;d为车辆实际行驶轨迹与行车道中线之间的距离 (图7) (m) ;D为车道宽度 (m) 。
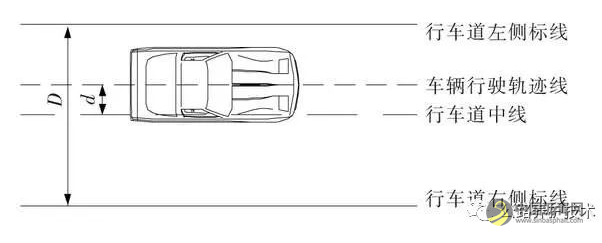
图7 车辆行驶轨迹偏移图
当车身左侧边缘与行车道左侧标线重合时, 车辆行驶轨迹偏移率为- (D-L) / (2D) ;当车身右侧边缘与行车道右侧标线重合时, 车辆行驶轨迹偏移率为 (D-L) / (2D) 。所以, 车辆行驶轨迹偏移率的范围为[- (D-L) / (2D) , (D-L) / (2D) ]。
假设养护作业工作区车辆的行驶速度为v0, 以不同速度行驶的车辆存在不同的侧向最小安全距离, 根据参考文献[15]中车辆行驶侧向安全距离为:

式中:v0为车辆行驶速度 (m/s) 。
相应地, 车辆正常运行的理论行驶轨迹偏移率的范围为{-[D-L-2 (0.010 3v0+0.56) ]/ (2D) , (D-L-2 (0.010 3v0+0.56) ) / (2D) }。
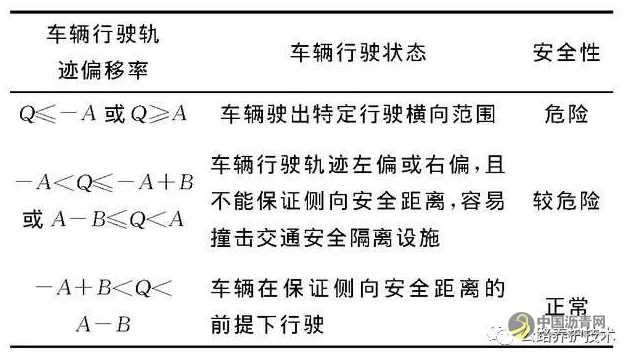
根据车辆行驶轨迹偏移率的计算判定养护作业工作区车辆运行的安全性, 如表5所示[令A= (D-L) / (2D) , B= (0.010 3v0+0.56) /D]。
表5 车辆行驶安全性分析
3.3 实例分析
选用G85渝昆高速某养护作业区为例进行说明, 该养护作业区的车道数为双向四车道, 行车道宽度为3.75 m, 应急车道宽度为3 m, 交通组织方式为单幅双通。对其进行实车试验和交通观测, 得知通行车辆以小型车和中型车为主, 工作区起点前后车辆的运行速度接近25 km/h, 并将驾驶员眼动数据与模型进行拟合, 得到车辆的预测行驶轨迹, 计算并根据车辆预测行驶轨迹偏移率判断车辆运行的安全性, 如图8所示。
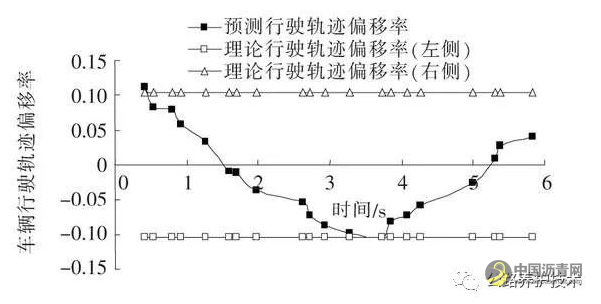
图8 工作区起点前后6s车辆行驶轨迹偏移率
由图8可知:车辆基本能够按照特定的路线行驶, 但并不能完全满足侧向安全距离, 车辆行驶存在一定危险性。所以, 在养护作业工作区起点前后应优化交通标志和安全隔离设施的布置, 在养护作业区人员和设备正常作业的前提下, 保证车辆安全行驶。
(1) 养护作业工作区驾驶员车道保持能力的影响因素主要有标志设置位置、交通量大小以及驾驶员自身因素等。
(2) 驾驶员车道保持能力的影响因子为驾驶员对工作区注视角度和注视时间。
(3) 在工作区起点前后6s内, 驾驶员对工作区的注视角度、注视时间与其他时间段相比存在一定差异。
(4) 车道保持能力用车辆行驶轨迹表征, 并建立驾驶员对工作区注视角度、注视时间和车辆行驶轨迹之间的关系模型。
(5) 将车道保持模型运用到工作区路段行车的安全性分析中, 并用车辆行驶轨迹偏移率判断车辆运行的安全性。
[1] 于英, 王敏, 金明新, 等.高速公路养护施工区安全特性的研究[J].中外公路, 2007 (6) .
[2] 陈瑜.高速公路作业区安全分析及交通组织管理方法研究[D].哈尔滨工业大学硕士学位论文, 2006.
[3] Asad J.Khattak, Aemal J.Khattak, Forrest M.Council.Effects of Work Zone Presence on Injury and Non-Injury Crashes[J].Accident Analysis&Prevention, 2002 (34) :19-29.
[4] Paul Schonfeld, Steven Chien.Optimal Work Zone Lengths for Two Lane Highway[J].Journal of Transportation Engineering, 1999, 125 (1) :21-29.
[5] 孟祥海, 祁文洁, 王浩, 等.高速公路半幅封闭施工作业区的通行能力[J].公路交通科技, 2012 (5) .
[6] Partrick S.Byrd, Geza Pesti, Daniel S.Jessen, et al.Traffic Flow Characteristics of the Late Merge Work Zone Control Strategy[C].The 78th Annual Meeting Transportation Research Board, 1999:1 023-1 046.
[7] LI YF, BAI Y.Development of Crash-Severity-Index Model for the Measurement of Work Zone Risk Level[J].Accident Analysis and Prevention, 2008, 40 (5) :1 724-1 731.
[8] LI YF, BAI Y.Highway Work Zone Risk Factors and Their Impact on Crash Severity[J].Journal of Transportation Engineering, 2009, 135 (10) :694-701.
[9] 朱继彬.高速公路大修工程交通组织方案研究[D].长安大学硕士学位论文, 2009.
[10] 周小焕, 郭忠印, 李国锋, 等.高速公路作业区汇入提示标志设置研究[J].公路工程, 2014 (4) .
[11] 李耘, 张生瑞, 茹渑博.高速公路施工区车流跟驰追尾冲突风险[J].长安大学学报:自然科学版, 2017 (2) .
[12] 吴彪, 许洪国, 戴彤焱.基于DEMATEL-ISM的高速公路作业区交通安全影响因素辨识[J].交通运输系统工程与信息, 2010 (5) .
[13] 朱福春.山区高速公路交织区、养护作业区安全容错能力提升技术[D].重庆交通大学硕士学位论文, 2015.
[14] 陈金山.山区公路弯道路段车辆行驶特性及安全对策研究[D].重庆交通大学硕士学位论文, 2013.
[15] L.Jose.Analysis of Lane Change Crash Avoidance[J].Highway Traffic Safety Administration, 1995 (2) .

主办单位:深圳海川信息科技有限公司
合作单位:广东省沥青混凝土供应链协会 | 全国混凝土标准化技术委员会沥青混凝土分技术委员会
沥青综合群:112171208 | 沥青销售群:74217223
站长信箱:23341570@qq.com | 业务QQ: 23341570 | 电话:15986629950(微信同号)
沥青网 版权声明 | 免责声明 | 粤ICP备18041746号-15 | 沥青网——沥青行业门户!
